Autonomous Underwater Robot Github
As a first year engineering project, I was grouped with my fellow peers, Matteo Aiello and Prashant Tadeparti. We were to mechanically build and program a VEX Robot from the ground up. This robot was to simulate Ocean Network Canada's autonomous underwater robot that connects cables of for their underwater systems.
Our task was to design a robot that simulate a cable being connected. Through various milestones, our robot had to find its own way to a beacon and place an object on it before backing away (simulating connecting a cable).
With this being my first major engineering design project, it was a challenging project but ultimately taught me a lot, and helped in my decision to choose Software Engineering as my discipline.
Our team used the Robot C programming language (a variant of C) to program the peripherals of the robot. These peripherals consisted of Servo motors that operated the wheels and the mechanism we used to place our object on the beacon. Walls were detected through an ultrasonic sensor where the beacon was detected through various phototransistors. Button/switch were also used to detect if a wall had been bumped into.
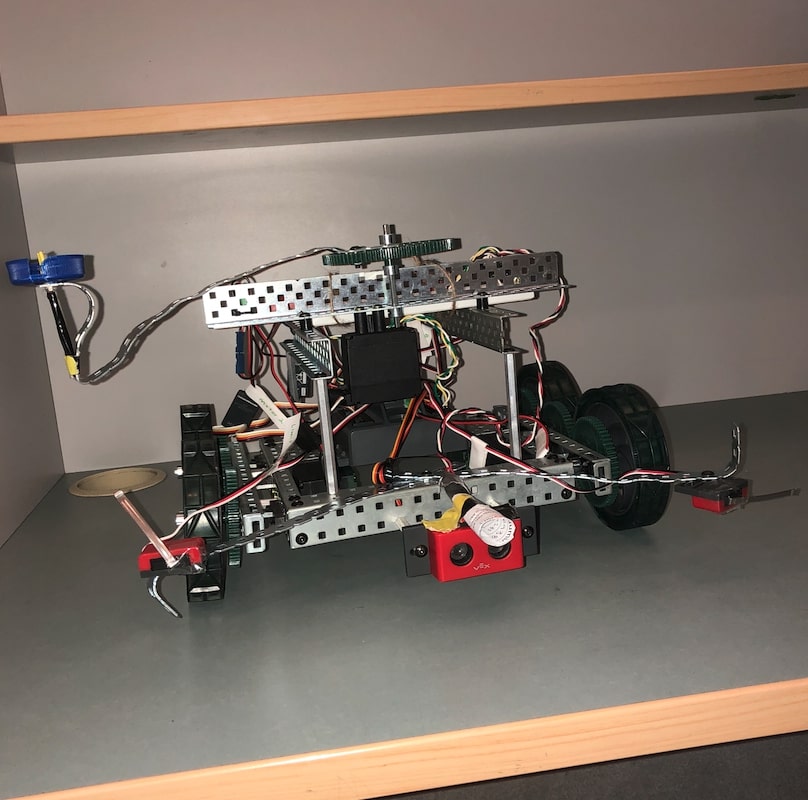
The video displayed is the demonstration of our final robot design. Our robot was a very successful project with our group receiving a 99%.